
Võrreldes radiaalvoomootoritega on aksiaalvoomootoritel elektrisõidukite disainis palju eeliseid. Näiteks aksiaalvoomootorid võivad muuta jõuülekande konstruktsiooni, liigutades mootorit teljelt rataste sisemusse.
1. Jõutelg
Aksiaalsed voomootoridsaavad järjest suuremat tähelepanu (haaravad veojõudu). Paljude aastate jooksul on seda tüüpi mootoreid kasutatud statsionaarsetes rakendustes, nagu liftid ja põllumajandusmasinad, kuid viimase kümne aasta jooksul on paljud arendajad töötanud selle tehnoloogia täiustamise nimel ja selle rakendamiseks elektrimootorratastel, lennujaamamootoritel, kaubaveoautodel, elektrilistel. sõidukid ja isegi lennukid.
Traditsioonilistes radiaalvoomootorites kasutatakse püsimagneteid või asünkroonmootoreid, mis on saavutanud märkimisväärseid edusamme kaalu ja kulude optimeerimisel. Siiski on neil arengu jätkamisel palju raskusi. Aksiaalvoog, täiesti erinevat tüüpi mootor, võib olla hea alternatiiv.
Võrreldes radiaalmootoritega on aksiaalvoo püsimagnetmootorite efektiivne magnetpind mootori rootori pind, mitte välisläbimõõt. Seetõttu võivad teatud mootorimahus aksiaalvoo püsimagnetmootorid tavaliselt pakkuda suuremat pöördemomenti.
Aksiaalsed voomootoridon kompaktsemad; Võrreldes radiaalmootoritega on mootori aksiaalne pikkus palju lühem. Sisemiste rataste mootorite puhul on see sageli otsustava tähtsusega tegur. Aksiaalmootorite kompaktne struktuur tagab samalaadsetest radiaalmootoritest suurema võimsustiheduse ja pöördemomendi tiheduse, välistades seega vajaduse ülikõrgete töökiiruste järele.
Aksiaalvoomootorite kasutegur on samuti väga kõrge, ületades tavaliselt 96%. Seda tänu lühemale, ühemõõtmelisele vooteele, mis on võrreldav või isegi kõrgem efektiivsusega võrreldes turu parimate 2D radiaalvoomootoritega.
Mootori pikkus on lühem, tavaliselt 5–8 korda lühem, samuti väheneb kaal 2–5 korda. Need kaks tegurit on muutnud elektrisõidukite platvormide kujundajate valikut.
2. Aksiaalvoo tehnoloogia
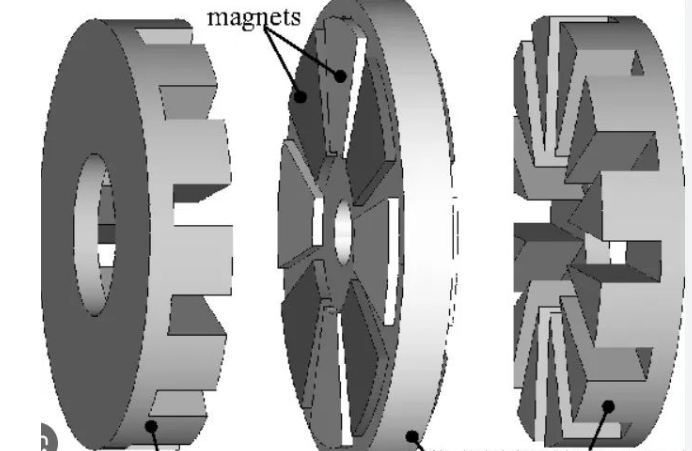
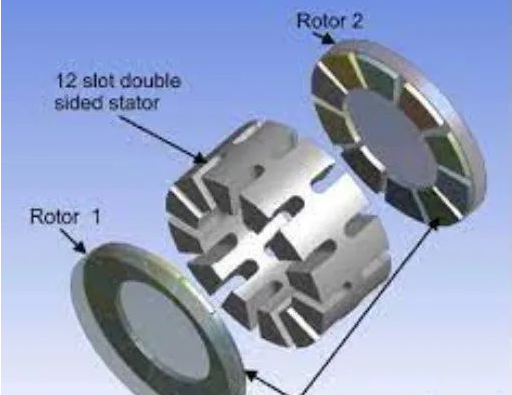
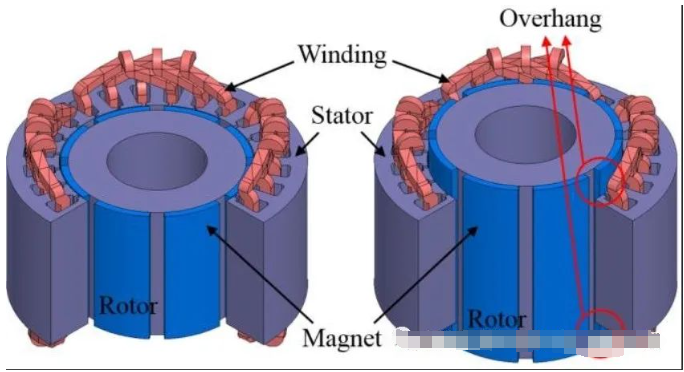
Selle jaoks on kaks peamist topoloogiataksiaalsed voomootorid: kahe rootoriga ühe staatoriga (mõnikord nimetatakse torustiilis masinateks) ja ühe rootoriga kahe staatoriga.
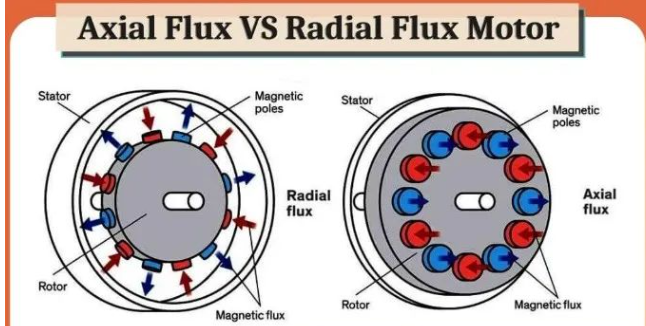
Praegu kasutavad enamik püsimagnetmootoreid radiaalvoo topoloogiat. Magnetvoo ahel algab rootori püsimagnetiga, läbib staatori esimest hammast ja voolab seejärel radiaalselt piki staatorit. Seejärel minge läbi teise hamba, et jõuda rootori teise magnetteraseni. Kahe rootori aksiaalse voo topoloogia korral algab voo ahel esimesest magnetist, läbib teljesuunas staatori hambaid ja jõuab kohe teise magnetini.
See tähendab, et voo tee on palju lühem kui radiaalvoomootoritel, mille tulemuseks on väiksemad mootorimahud, suurem võimsustihedus ja efektiivsus sama võimsuse juures.
Radiaalmootor, kus magnetvoog läbib esimest hammast ja naaseb seejärel läbi staatori järgmise hamba juurde, jõudes magnetini. Magnetvoog järgib kahemõõtmelist rada.
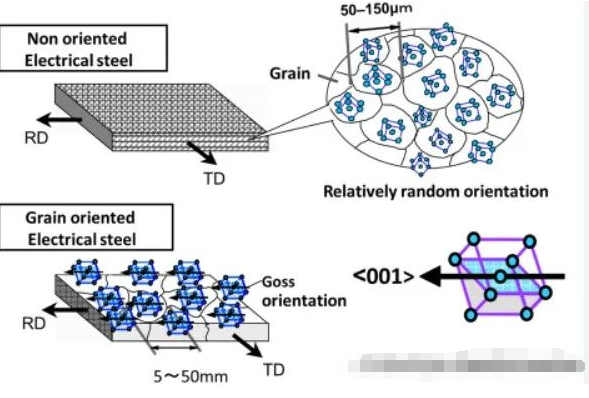
Aksiaalse magnetvoo masina magnetvoo teekond on ühemõõtmeline, seega saab kasutada teraorienteeritud elektriterast. See teras hõlbustab voo läbimist, parandades seeläbi tõhusust.
Radiaalvoomootorites kasutatakse traditsiooniliselt hajutatud mähiseid, kusjuures kuni pooled mähise otstest ei tööta. Mähise üleulatuv osa toob kaasa täiendava kaalu, kulud, elektritakistuse ja suurema soojuskadu, sundides disainereid mähise konstruktsiooni parandama.
Mähis lõpebaksiaalsed voomootoridon palju vähem ja mõned konstruktsioonid kasutavad kontsentreeritud või segmenteeritud mähiseid, mis on täiesti tõhusad. Segmenteeritud staatori radiaalmasinate puhul võib magnetvoo tee purunemine staatoris kaasa tuua lisakadusid, kuid aksiaalvoomootorite puhul pole see probleem. Pooli mähise disain on tarnijate taseme eristamise võti.
3. Areng
Aksiaalvoomootorid seisavad silmitsi tõsiste väljakutsetega projekteerimisel ja tootmisel, hoolimata nende tehnoloogilistest eelistest on nende kulud palju kõrgemad kui radiaalmootoritel. Inimesed tunnevad radiaalmootoreid väga põhjalikult ning tootmismeetodid ja mehaanilised seadmed on samuti kergesti kättesaadavad.
Aksiaalvoomootorite üks peamisi väljakutseid on ühtlase õhuvahe hoidmine rootori ja staatori vahel, kuna magnetjõud on palju suurem kui radiaalmootoritel, mistõttu on ühtlase õhuvahe hoidmine raskendatud. Kahe rootori aksiaalvoomootoril on ka probleeme soojuse hajutamisega, kuna mähis asub sügaval staatori sees ja kahe rootoriketta vahel, muutes soojuse hajumise väga keeruliseks.
Aksiaalvoomootoreid on ka mitmel põhjusel keeruline valmistada. Kahe rootoriga masin, mis kasutab topoloogiaga kahe rootoriga masinat (st eemaldab staatorist raudikke, kuid säilitab raudhambad), lahendab mõned neist probleemidest ilma mootori läbimõõtu ja magnetit suurendamata.
Ikke eemaldamine toob aga kaasa uusi väljakutseid, näiteks üksikute hammaste kinnitamine ja positsioneerimine ilma mehaanilise ikeühenduseta. Jahutamine on ka suurem väljakutse.
Samuti on raske toota rootorit ja hoida õhuvahet, kuna rootori ketas tõmbab rootorit ligi. Eeliseks on see, et rootori kettad on otse ühendatud võllirõnga kaudu, nii et jõud tühistavad üksteist. See tähendab, et sisemine laager ei pea neile jõududele vastu ja selle ainus ülesanne on hoida staatorit kahe rootoriketta vahel keskmises asendis.
Kahe staatoriga ühe rootoriga mootorid ei seisa silmitsi ringmootorite väljakutsetega, kuid staatori konstruktsioon on palju keerulisem ja raskemini saavutatav automatiseerimine ning sellega seotud kulud on samuti suured. Erinevalt kõigist traditsioonilistest radiaalvoomootoritest on aksiaalmootorite tootmisprotsessid ja mehaanilised seadmed ilmunud alles hiljuti.
4. Elektrisõidukite rakendamine
Usaldusväärsus on autotööstuses ülioluline ning tõestab erinevate autode töökindlust ja vastupidavustaksiaalsed voomootoridTootjate veenmine, et need mootorid sobivad masstootmiseks, on alati olnud väljakutse. See on sundinud aksiaalmootorite tarnijaid iseseisvalt läbi viima ulatuslikke valideerimisprogramme, kusjuures iga tarnija näitab, et nende mootorite töökindlus ei erine traditsioonilistest radiaalvoomootoritest.
Ainus komponent, mis võib kuludaaksiaalvoo mootoron laagrid. Aksiaalse magnetvoo pikkus on suhteliselt lühike ja laagrite asend on lähemal, tavaliselt projekteeritud veidi "üle dimensiooniks". Õnneks on aksiaalvoomootor väiksema rootori massiga ja talub väiksemaid rootori dünaamilise võlli koormusi. Seetõttu on laagritele rakendatav tegelik jõud palju väiksem kui radiaalvoo mootoril.

Elektrooniline telg on üks esimesi aksiaalmootorite rakendusi. Õhem laius võib mootori ja käigukasti teljesse kapseldada. Hübriidrakendustes lühendab mootori lühem teljesuunaline pikkus omakorda ülekandesüsteemi kogupikkust.
Järgmine samm on aksiaalmootori paigaldamine rattale. Sel viisil saab võimsust otse mootorilt ratastele üle kanda, parandades mootori efektiivsust. Tänu jõuülekannete, diferentsiaalide ja veovõllide kaotamisele on vähendatud ka süsteemi keerukust.
Siiski tundub, et standardkonfiguratsioone pole veel ilmunud. Iga originaalseadmete tootja uurib konkreetseid konfiguratsioone, kuna aksiaalmootorite erinevad suurused ja kujud võivad muuta elektrisõidukite disaini. Võrreldes radiaalmootoritega on aksiaalmootoritel suurem võimsustihedus, mis tähendab, et saab kasutada väiksemaid aksiaalmootoreid. See pakub sõidukiplatvormidele uusi disainivõimalusi, näiteks akukomplektide paigutust.
4.1 Segmenteeritud armatuur
YASA (Yokeless and Segmented Armature) mootori topoloogia on näide kahe rootori ühe staatori topoloogiast, mis vähendab tootmise keerukust ja sobib automatiseeritud masstootmiseks. Nende mootorite võimsustihedus on kuni 10 kW/kg kiirustel 2000–9000 p/min.

Spetsiaalset kontrollerit kasutades suudab see anda mootorile voolu 200 kVA. Kontrolleri maht on ligikaudu 5 liitrit ja kaal 5,8 kilogrammi, sealhulgas dielektrilise õlijahutusega termojuhtimine, mis sobib nii aksiaalvoomootoritele kui ka asünkroon- ja radiaalvoomootoritele.
See võimaldab elektrisõidukite originaalseadmete tootjatel ja esmatasandi arendajatel paindlikult valida sobiva mootori, lähtudes rakendusest ja vabast ruumist. Väiksem suurus ja kaal muudavad sõiduki kergemaks ja sellel on rohkem akusid, suurendades seeläbi sõiduulatust.
5. Elektrimootorrataste rakendamine
Elektrimootorrataste ja ATV-de jaoks on mõned ettevõtted välja töötanud vahelduvvoolu aksiaalvoomootorid. Seda tüüpi sõidukite puhul kasutatakse tavaliselt alalisvooluharjapõhiseid aksiaalseid voogusid, samas kui uus toode on vahelduvvooluga täielikult suletud harjadeta konstruktsioon.
Nii alalis- kui ka vahelduvvoolumootorite mähised jäävad paigale, kuid topeltrootorid kasutavad pöörlevate armatuuride asemel püsimagneteid. Selle meetodi eeliseks on see, et see ei vaja mehaanilist tagurdamist.
Vahelduvvoolu aksiaalkonstruktsioonis saab kasutada ka standardseid kolmefaasilisi vahelduvvoolumootorite kontrollereid radiaalmootorite jaoks. See aitab vähendada kulusid, kuna kontroller juhib pöördemomendi voolu, mitte kiirust. Kontroller nõuab sagedust 12 kHz või rohkem, mis on selliste seadmete põhisagedus.
Kõrgem sagedus tuleneb mähise madalamast induktiivsusest 20 µH. Sagedus suudab voolu juhtida, et minimeerida voolu pulsatsiooni ja tagada sinusoidaalne signaal võimalikult sujuv. Dünaamilisest vaatenurgast on see suurepärane viis mootori sujuvamaks juhtimiseks, võimaldades kiireid pöördemomendi muutusi.
See disain kasutab hajutatud kahekihilist mähist, nii et magnetvoog voolab rootorist teise rootorisse läbi staatori väga lühikese tee ja suurema efektiivsusega.
Selle disaini võtmeks on see, et see võib töötada maksimaalse pingega 60 V ja ei sobi kõrgema pingega süsteemidele. Seetõttu saab seda kasutada elektrimootorrataste ja L7e klassi neljarattaliste sõidukite nagu Renault Twizy jaoks.
Maksimaalne pinge 60 V võimaldab mootorit integreerida tavalistesse 48 V elektrisüsteemidesse ja lihtsustab hooldustöid.
Euroopa raammääruse 2002/24/EÜ neljarattaliste mootorrataste L7e spetsifikatsioonid näevad ette, et kaubaveoks kasutatavate sõidukite kaal ei ületa 600 kilogrammi, arvestamata akude kaalu. Nendel sõidukitel on lubatud vedada kuni 200 kilogrammi reisijaid, kuni 1000 kilogrammi lasti ja mitte rohkem kui 15 kilovatti mootori võimsust. Jaotatud mähismeetodil on võimalik anda pöördemomenti 75-100 Nm, tippvõimsusega 20-25 kW ja pideva võimsusega 15 kW.
Aksiaalse voo väljakutse seisneb selles, kuidas vaskmähised soojust hajutavad, mis on keeruline, kuna soojus peab läbima rootori. Jaotatud mähis on selle probleemi lahendamise võti, kuna sellel on palju pooluste pilusid. Nii jääb vase ja kesta vahele suurem pindala ning soojust saab väljapoole üle kanda ja välja lasta standardse vedelikjahutussüsteemiga.
Mitu magnetpoolust on võtmeks sinusoidaalsete lainevormide kasutamisel, mis aitavad harmoonilisi vähendada. Need harmoonilised avalduvad magnetite ja südamiku kuumenemisena, samas kui vaskkomponendid ei suuda soojust ära kanda. Kui soojus akumuleerub magnetitesse ja raudsüdamikesse, väheneb efektiivsus, mistõttu on mootori jõudluse jaoks ülioluline lainekuju ja soojustee optimeerimine.
Mootori konstruktsioon on optimeeritud, et vähendada kulusid ja saavutada automatiseeritud masstootmine. Ekstrudeeritud korpuse rõngas ei vaja keerulist mehaanilist töötlemist ja võib vähendada materjalikulusid. Mähise saab otse kerida ja õige montaažikuju säilitamiseks kasutatakse mähisprotsessi ajal sidumisprotsessi.
Võtmepunkt on see, et mähis on valmistatud tavalisest kaubanduslikult saadavast traadist, samas kui raudsüdamik on lamineeritud standardse riiulitrafo terasega, mis tuleb lihtsalt vormida. Muud mootorikonstruktsioonid nõuavad pehmete magnetiliste materjalide kasutamist südamiku lamineerimisel, mis võib olla kallim.
Jaotatud mähiste kasutamine tähendab, et magnetterast ei ole vaja segmentida; Need võivad olla lihtsama kujuga ja kergemini valmistatavad. Magnetterase mõõtmete vähendamine ja selle valmistamise lihtsuse tagamine mõjutab oluliselt kulusid.
Selle aksiaalse voomootori disaini saab kohandada ka vastavalt kliendi nõudmistele. Kliendid on kohandatud versioonid, mis on välja töötatud põhidisaini ümber. Seejärel toodetakse proovitootmisliinil varajaseks tootmise kontrollimiseks, mida saab korrata teistes tehastes.
Kohandamine on peamiselt tingitud sellest, et sõiduki jõudlus ei sõltu mitte ainult aksiaalse magnetvoo mootori konstruktsioonist, vaid ka sõiduki konstruktsiooni, aku ja BMS-i kvaliteedist.
Postitusaeg: 28. september 2023


